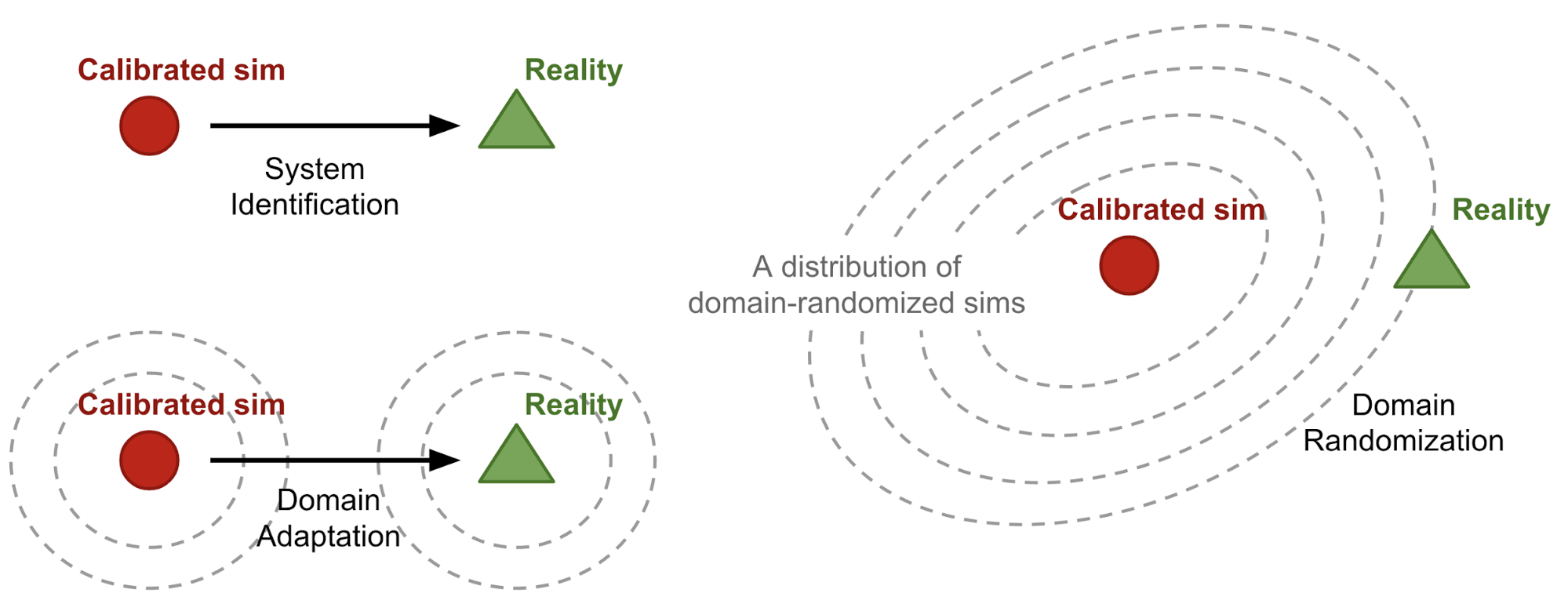
Domain Randomization (DR) is a technique used in robotics to bridge the gap between simulated training environments and the real world. This method involves training models across a wide variety of simulated scenarios with randomized physical parameters and visual appearances. The goal is for the trained model to generalize effectively to the real-world environment, which is assumed to be one of the many variations encountered during training. DR is particularly useful because it can require minimal or no real-world data, unlike domain adaptation methods. AI
Summary written by gemini-2.5-flash-lite from 1 source. How we write summaries →
RANK_REASON The item is a blog post discussing a research technique (Domain Randomization) for sim2real transfer in robotics.